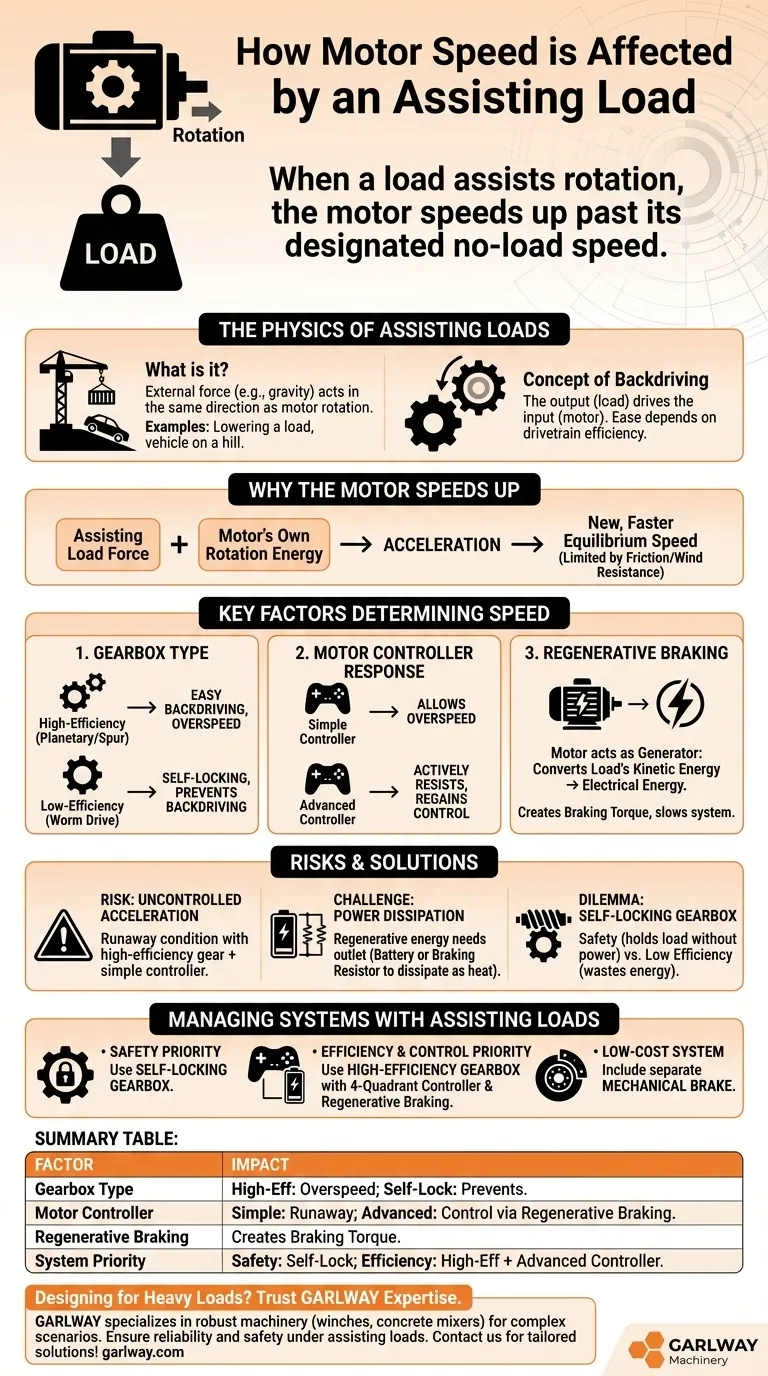
負荷がモーターの回転をアシストする場合、モーターは加速し、多くの場合、無負荷速度よりも速く回転します。この加速の程度は、システムの機械的特性、特に負荷がギアボックスを介してモーターをどれだけ容易に「バックドライブ」できるかによって決まります。
アシスト負荷、または「オーバーハウリング」負荷は、システムに独自のエネルギーを加え、モーターを加速させます。最終的な速度は、この外力と、システムがそれに抵抗する能力との間のバランスの取り合いになります。これは主にギアボックスの設計とモーターコントローラーの応答によって決まります。
アシスト負荷の物理学
モーター速度を適切に制御するには、まず負荷が動きに抵抗するのではなく、それを助ける場合に作用する力について理解する必要があります。
アシスト負荷とは?
アシスト負荷、またはオーバーハウリング負荷とも呼ばれるものは、モーターの意図した回転と同じ方向に作用するあらゆる外力です。
一般的な例としては、クレーンが重い物体を降ろす際の重力や、急な坂道を下る車両などが挙げられます。これらの場合、モーターのタスクは負荷を駆動することから、その降下を制御することに変わります。
バックドライビングの概念
バックドライビングとは、システムの出力(負荷)が入力(モーター)を駆動することです。これは通常の操作とは逆です。
おもちゃの車を坂道に押していくのを想像してみてください。それが通常の操作です。次に、その車を坂道に保持して、坂道を転がり落ちるのを制御するのを想像してみてください。それがバックドライビング負荷を管理することです。これが起こる容易さは、完全にドライブトレインに依存します。
モーターが加速する理由
制御機構がない場合、アシスト負荷からのエネルギーがモーター自身の回転と組み合わさり、加速を引き起こします。
システムは、摩擦と空気抵抗の力がアシスト負荷の力と等しくなるのに十分な抵抗を生み出すまで加速し続け、新しい、より速い平衡速度を確立します。

最終速度を決定する主要な要因
実際の速度は無限ではありません。それはあなたのシステム内のいくつかの主要なコンポーネントによって制限されます。
ギアボックスの重要な役割
ギアボックスは、しばしば最も重要な単一の要因です。バックドライブされる能力は、その設計と内部摩擦の関数です。
平歯車や遊星歯車のような高効率のギアタイプは、非常に簡単にバックドライブされます。それらは負荷に対してほとんど抵抗を与えません。
逆に、低効率のギアタイプ、特に高減速比のウォームギアは、セルフロックされる可能性があります。ギアボックス内の摩擦が非常に高いため、電源がない場合でも、負荷がモーターをバックドライブするのを機械的に防ぎます。
モーターコントローラーの応答
単純な電源は電圧を供給し、モーターを回転させます。しかし、洗練されたモーターコントローラーは、オーバー・スピード状態を検出できます。
コントローラーがモーターがコマンドされた速度よりも速く回転していることを検出すると、その動作を変更して積極的に動きに抵抗し、速度制御を回復できます。
回生ブレーキ
負荷がモーターを指定された無負荷速度よりも速く回転させる場合、モーターは本質的に発電機になります。
回生ブレーキと呼ばれるこのプロセスは、負荷の運動エネルギーを電気エネルギーに変換します。この発電は、負荷に直接反対する制動トルクを生み出し、システムを減速させます。高度なモーターコントローラーは、降下中の速度を正確に制御するためにこの原理を使用します。
トレードオフとリスクの理解
アシスト負荷の管理には、安全性、効率性、コスト間の重要なエンジニアリング上のトレードオフが伴います。
制御されない加速のリスク
高効率のギアボックスとブレーキをかけられない単純なコントローラーを組み合わせると、アシスト負荷が暴走状態を引き起こす可能性があります。これは、モーター、ドライブトレイン、またはペイロード自体を損傷する危険な速度につながる可能性があります。
電力散逸の課題
回生ブレーキは電力を生成し、そのエネルギーはどこかに行かなければなりません。バッテリーを充電することはできますが、バッテリーがいっぱいであるか、主電源を使用している場合、エネルギーはどこにも行き場がありません。
これは、モーターコントローラーを損傷する電圧スパイクを引き起こす可能性があります。解決策は、この余分なエネルギーを熱として安全に散逸させるように設計された制動抵抗器です。
セルフロックギアボックスのジレンマ
セルフロック式ウォームギアは、システムがすべての電源を失った場合でも負荷を保持できるため、固有の安全性を提供します。
しかし、この安全性は非常に低い効率の代償を伴います。通常の操作中、同じ内部摩擦が熱としてかなりの量のエネルギーを浪費し、より大きなモーターとより多くの電力が必要になります。
アシスト負荷のあるシステムの管理方法
設計の選択は、フェイルセーフの負荷保持を優先するか、効率的で制御された動きを優先するかによって完全に異なります。
- 安全と負荷の保持が最優先事項の場合:セルフロック式ギアボックス(高減速比ウォームギアなど)を使用して、機械的にバックドライブを防ぎます。
- エネルギー効率と正確な速度制御が最優先事項の場合:回生ブレーキを実行し、散逸するエネルギーを管理できる4象限モーターコントローラーを備えた高効率ギアボックスを使用します。
- シンプルで低コストのシステムが最優先事項の場合:負荷を安全に保持し、暴走状態を防ぐために、個別の機械式ブレーキを含める必要があります。
最終的に、負荷がドライブトレインとどのように相互作用するかを理解することが、安全で効率的で信頼性の高いモーションシステムを設計するための鍵となります。
概要表:
| 要因 | アシスト負荷でのモーター速度への影響 |
|---|---|
| ギアボックスタイプ | 高効率ギア(例:遊星ギア)は容易なバックドライブとオーバー・スピードを許容します。セルフロックギア(例:ウォームギア)はそれを防ぎます。 |
| モーターコントローラー | 単純なコントローラーは暴走につながる可能性があります。高度なコントローラーは回生ブレーキを使用して制御を維持できます。 |
| 回生ブレーキ | 余分な運動エネルギーを電気エネルギーに変換し、システムを減速させる制動トルクを生成します。 |
| システム優先順位 | 安全性:セルフロック式ギアボックスを使用します。効率:高度なコントローラーを備えた高効率ギアボックスを使用します。 |
重負荷向けの信頼性の高いモーション制御システムを設計していますか? GARLWAYは、複雑な負荷シナリオを安全かつ効率的に処理できるように設計された、ウィンチやコンクリートミキサーなどの堅牢な建設機械を専門としています。当社の専門知識により、お客様の機器はアシスト負荷の下でも確実に動作し、暴走状態を防ぎ、稼働時間を最大化します。 お客様固有のアプリケーション要件についてご相談ください — カスタマイズされたソリューションについては、今すぐエンジニアリングチームにお問い合わせください!
ビジュアルガイド